VoexlGrid Filter
pcl_apps::VoexlGridFilterComponent has these topic interface.
| Input Topics |
Type |
Description |
|---|
| (param : ~/input_topic) |
sensor_msgs::msg::PointCloud2 |
Input Point Cloud |
| Output Topics |
Type |
Description |
|---|
| ~/output |
sensor_msgs::msg::PointCloud2 |
Output Point Cloud |
| Parameter |
Type |
Description |
Default |
|---|
| ~/leaf_size |
Double |
Leaf size of the Voexlgrid |
1.0 |
| ~/input_topic |
String |
input topic name |
~/input |
Description
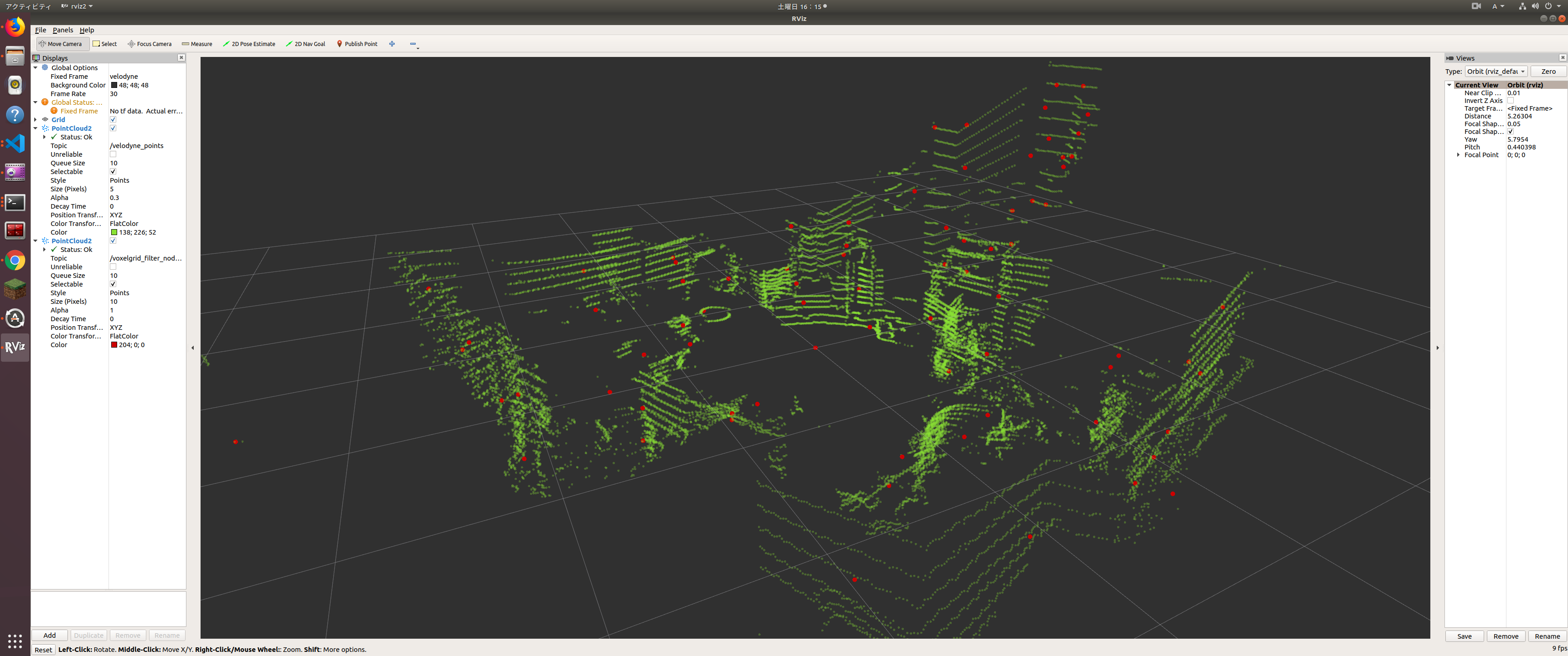
pcl_apps::VoexlGridFilterComponent subscribe PointCloud topic and publish downsampled pointcloud by using Voexlgrid Filter
Requirements
- leaf_size should be over 0
How to launch with single node
ros2 run pcl_apps voxelgrid_filter_node